24 February 2018
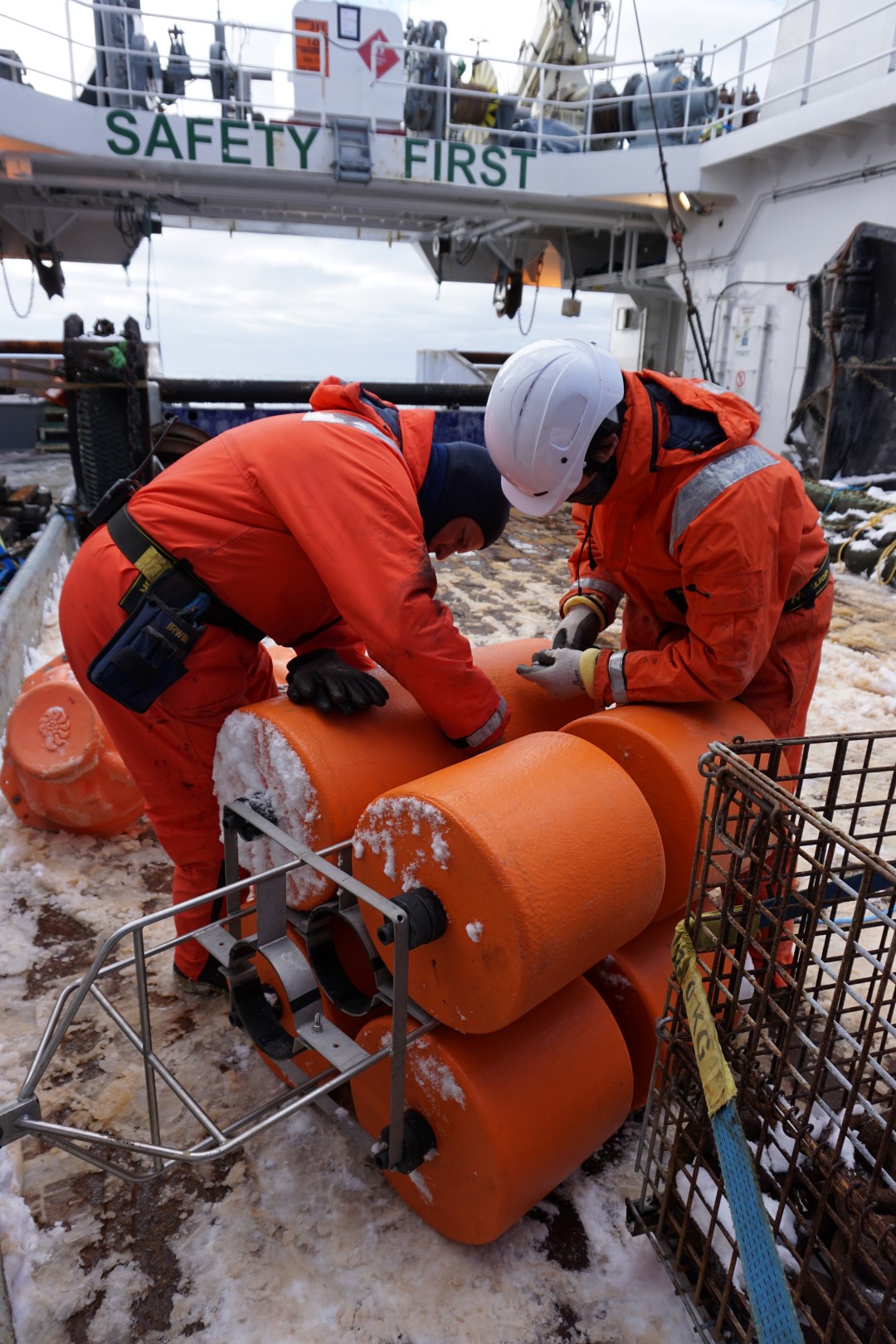
Scientists Yoann Ladroit and Pablo Escobar-Flores from NIWA, along with crew Shane Harvey, Bruce McIntyre and Bryce Bennett, have been busy assembling an active acoustic mooring for deployment.

This piece of equipment will be deployed close to shore, in water that is only 400m deep. The instrument will send out acoustic pings from the bottom of the sea to the surface, and listen for the signal bouncing back from animals in the water, particularly krill or silverfish.
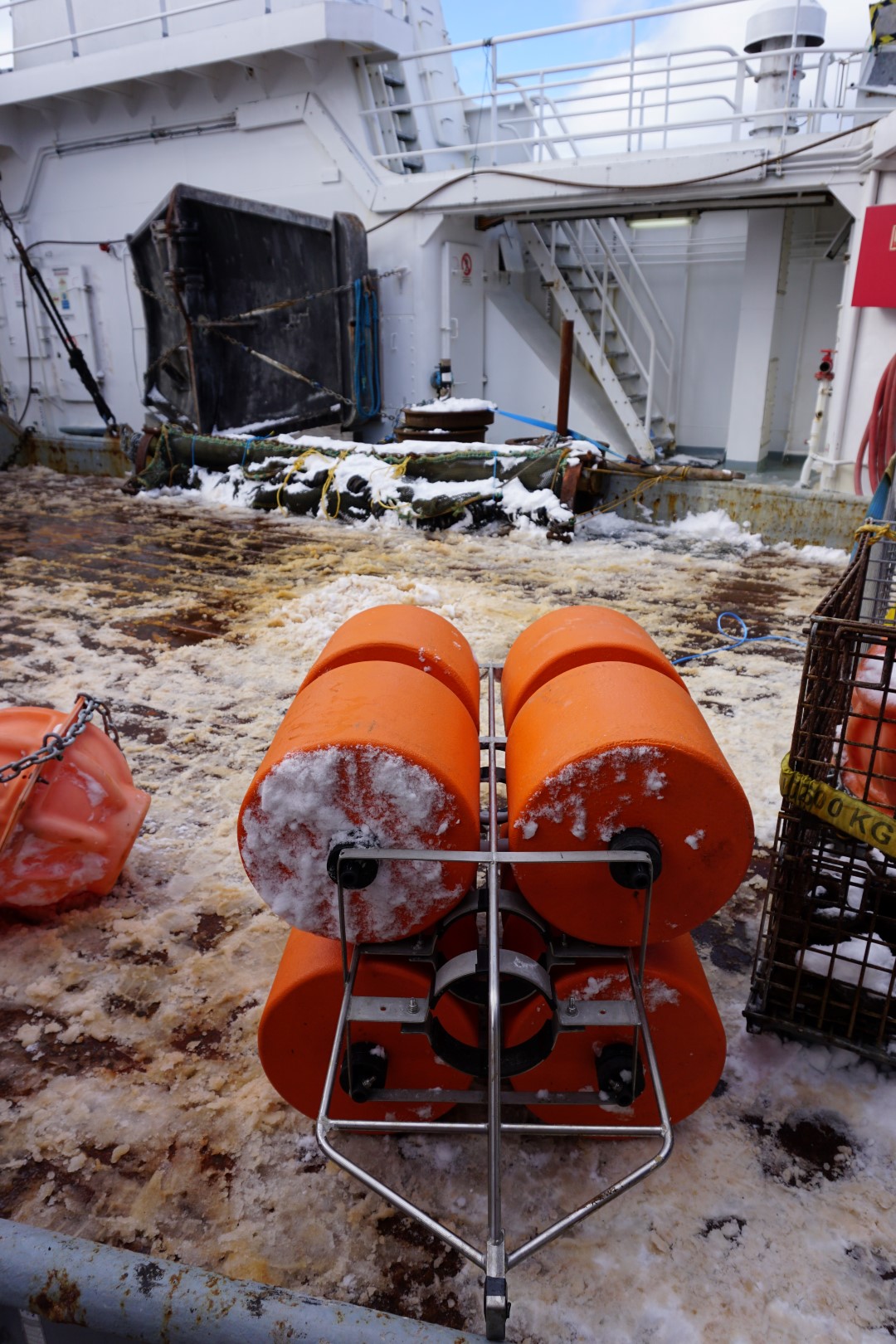
Scientists hope to study the biological community during winter conditions, when this area freezes over and becomes inaccessible. In addition to detecting micronekton (krill and silverfish), data from the acoustic mooring can also show the timing and extent of ice formation over the area. The location is just offshore of Cape McCormick, which was chosen because a large penguin colony resides on the shores nearby, suggesting the potential for higher concentrations of micronekton in the wintertime.
Seabed communities of the Ross Sea Marine Protected Area.
Meanwhile, we have been working on the Iselin Bank in the last two days, and that means starting to complete some of the science objectives of the benthic team to improve our knowledge of the composition and structure of seabed communities living in and outside of the Ross Sea Marine Protected Area.
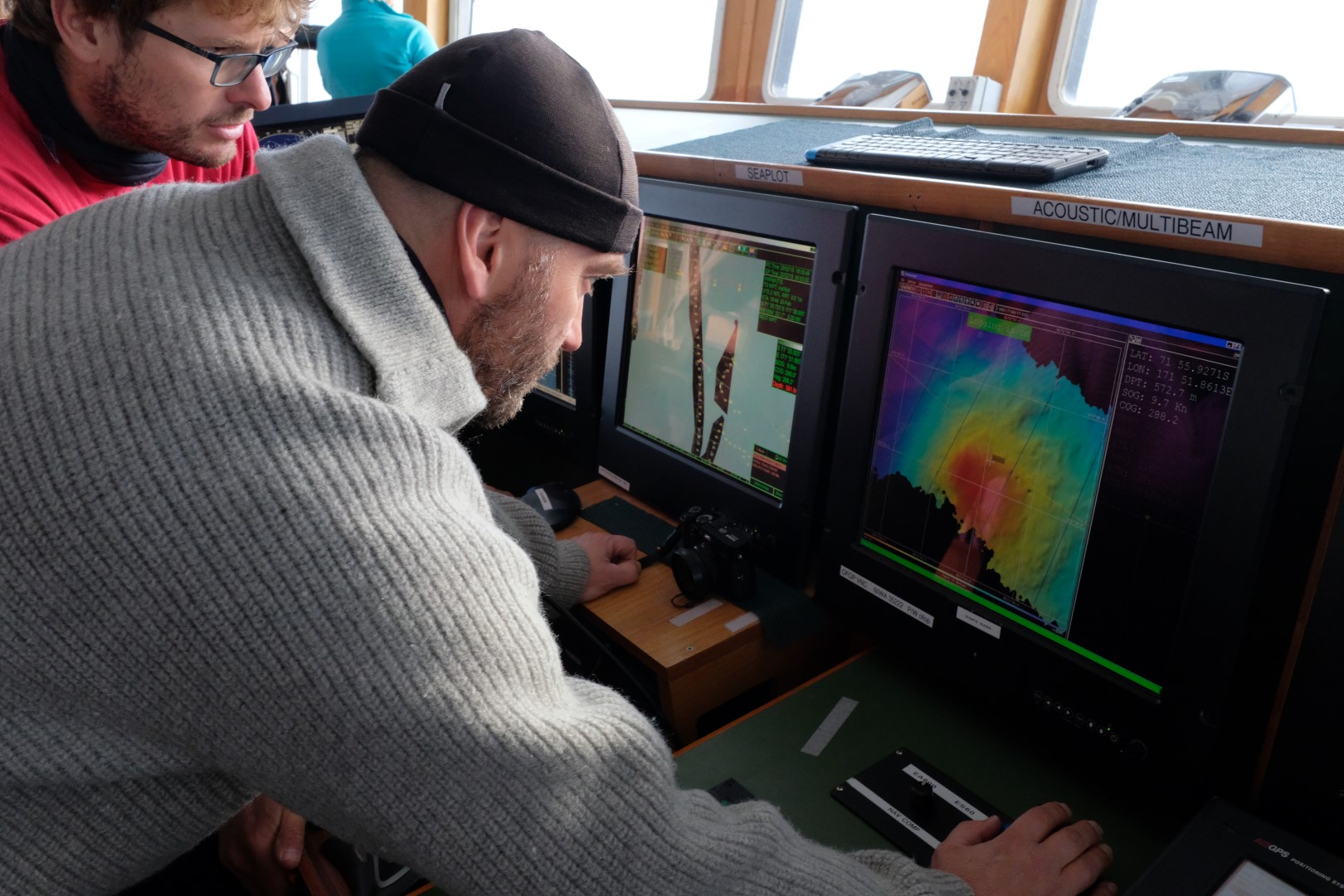
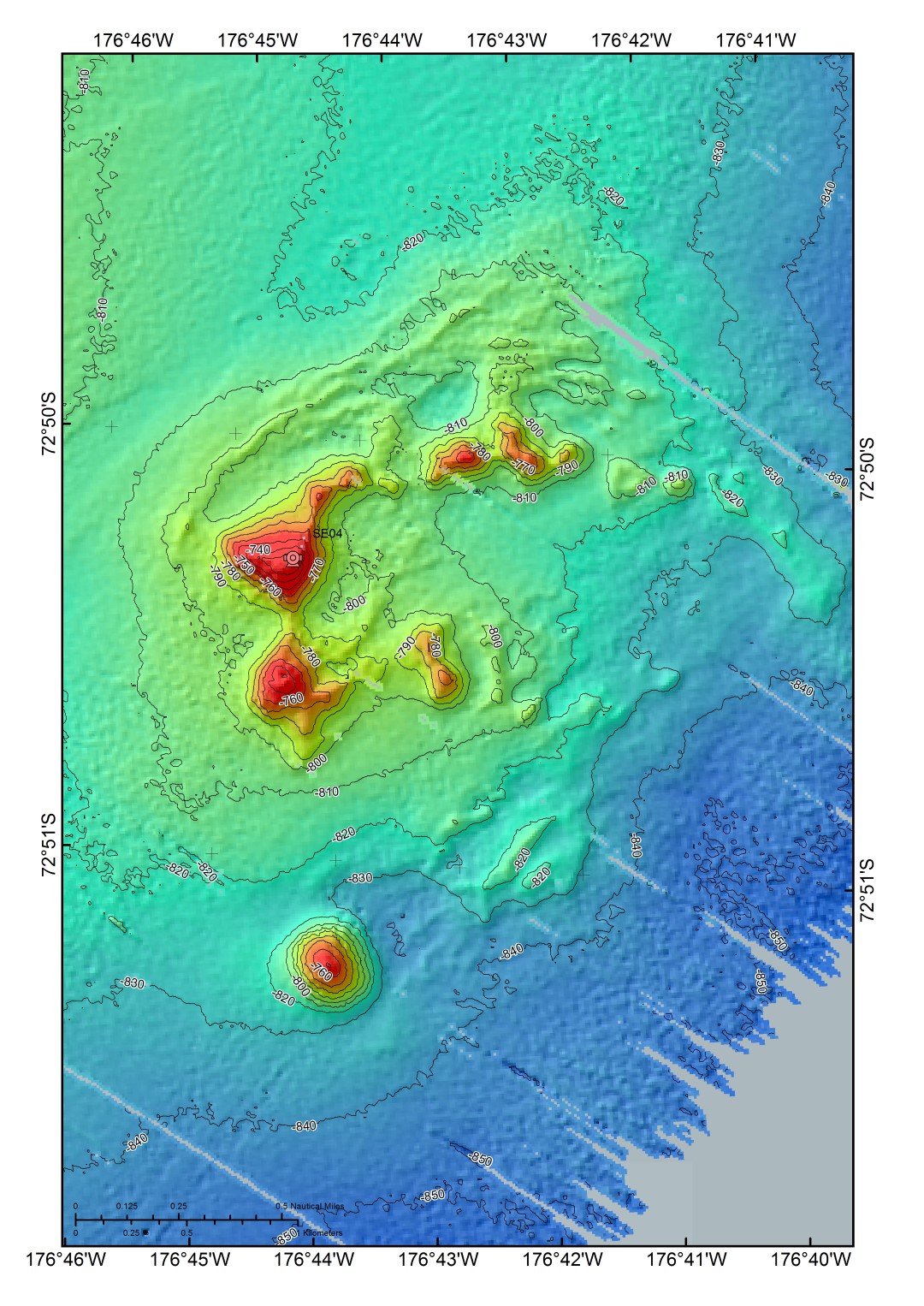
The first thing the benthic team needs to do when they arrive at a site is to map it. We need to know what the terrain of the seabed is like before we deploy any of our camera equipment or sleds. Is it just flat plain seabed or is it a steeply sloping and rugged seamount? This is when Arne Pallentin, NIWA, runs the Kongsberg EM302 multibeam echosounder system.
Down in the very bottom deck of the ship Arne monitors the system from the computer room while it is running to check the quality of data we are collecting. After the raw data is recorded, the data are processed and turned into a meaningful map that the benthic team leader Malcolm Clark (NIWA) uses to plan his strategy for the camera deployments.
Adelie penguin

We’ve also had a small distraction in the form of a very cute surprise visitor, an Adelie penguin. It decided to hop up onto the stern ramp of the ship. The penguin didn’t stick around very long but Bosun Glen Walker got some fantastic photos we hope you like.




